熱線:021-66110810,66110819
手機:13564362870
熱線:021-66110810,66110819
手機:13564362870
Aquatic Eddy Correlation: Quantifying the Artificial Flux Caused by Stirring-Sensitive O2 Sensors
生渦相關性:量化攪拌敏感型 O2 傳感器引起的人工通量
來源:PLoS ONE 10(1):e0116564. January 30, 2015
一、摘要內容
摘要指出,水生渦度相關技術是一種強大的非侵入性方法,用于測量沉積物-水界面的氧氣通量。該技術的核心是將同一采樣體積內高頻測量的湍流速度波動與氧氣濃度波動相關聯。目前,高頻氧氣測量通常使用電化學微傳感器。然而,由于這類傳感器自身消耗氧氣,其信號對環境流速變化(即攪拌)敏感。這種“攪拌敏感性”會導致流速與氧氣信號之間產生固有的相關性,從而造成一種干擾底棲通量測定的人工通量。為評估此人工通量,研究在一個密封的環形水槽(無任何氧氣匯和源)中測量了湍流速度與氧氣微傳感器信號之間的相關性。實驗結果顯示,即使對于攪拌敏感性低至約0.7%的傳感器,也存在顯著的相關性。人工通量取決于環境流動條件,且反直覺地隨流速增加而增大。在弱和極強湍流下,測得的人工通量范圍分別為2至70 mmol m?2 d?1。此外,攪拌敏感性還取決于傳感器相對于水流的方向。并行測試的光學微傳感器(理論上無攪拌敏感性)則未顯示O2信號與湍流有任何顯著相關性。結論是,使用電化學傳感器獲得的渦度相關數據可能受人造通量影響,建議在未來研究中采用光學微傳感器。
二、研究目的
本研究的主要目的是量化和評估電化學氧氣微傳感器的“攪拌敏感性”對水生渦度相關通量測量造成的誤差(即“人工通量”)。具體目標包括:
從理論上預測攪拌敏感性可能導致的人工通量大小及其與流速等因素的關系。
通過受控實驗,在無真實氧氣通量的環境下,直接測量和驗證由攪拌敏感性引起的人工通量。
比較電化學傳感器和光學傳感器在相同條件下的表現。
探討人工通量對野外測量的影響,并為未來的渦度相關測量提供建議。
三、研究思路
研究采用理論建模與受控實驗相結合的思路:
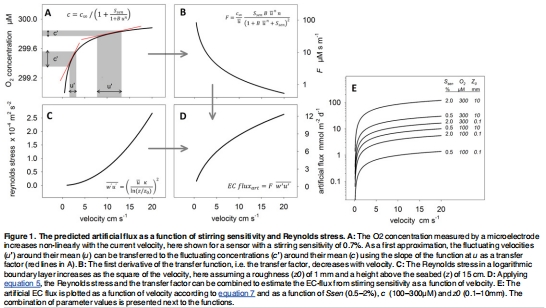
理論建模:基于傳感器攪拌敏感性的物理機制(流速影響傳感器尖端擴散邊界層厚度,從而影響信號),建立數學模型(MODEL 1 和簡化的 MODEL 2),預測人工通量如何隨平均流速、雷諾應力、傳感器靈敏度等參數變化。理論預測展示在圖1中。
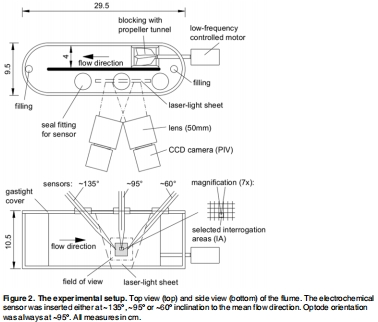
實驗驗證:在一個完全密封、無氧氣源/匯的環形水槽中,使用立體粒子圖像測速技術測量三維流速。將電化學微傳感器和光學微傳感器(optode)置于水槽中,在不同平均流速(1.7-19.2 cm s?1)和不同傳感器取向(約60°、95°、135°)下,同步記錄流速和氧氣濃度的時間序列。實驗設置如圖2所示。
數據對比與分析:計算電化學傳感器信號與流速波動之間的通量(包括縱向和垂直方向),并將其與光學傳感器的結果(應無顯著通量)以及模型預測值進行對比,以驗證人工通量的存在、大小和特性。
四、測量數據及其研究意義(注明圖表來源)
研究測量了多類數據,其意義和來源如下:
傳感器攪拌敏感性參數:通過改變流速,測量了所用電化學傳感器的攪拌靈敏度S_sen為0.7%,并確定了其傳遞函數中的參數B和n(分別為30和0.65)。光學傳感器則理論上無攪拌敏感性。
研究意義:這是量化人工通量的基礎。較低的S_sen值(0.7%)使得本研究結論更為保守和可靠,說明即使是高性能的電化學傳感器也無法避免此問題。
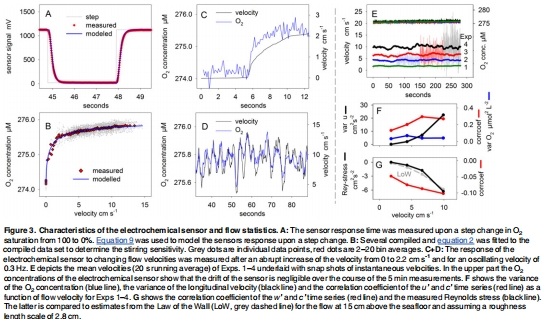
數據來源:傳感器的響應時間和攪拌敏感性標定結果展示在圖3A-D。
湍流統計數據:測量了不同流速下的縱向速度方差和雷諾應力。
研究意義:雷諾應力是模型預測人工通量的關鍵輸入參數。數據顯示湍流強度隨平均流速增加而顯著增強,為解釋人工通量為何隨流速增大提供了依據。
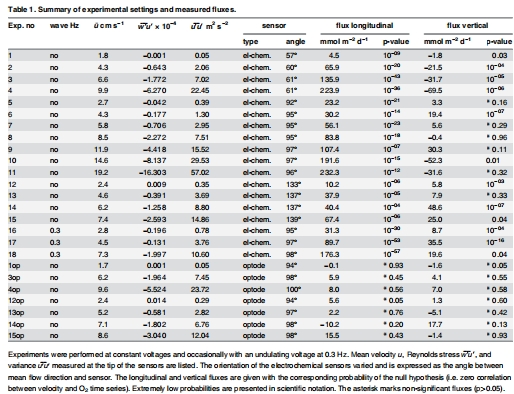
數據來源:這些數據在圖3F-G中顯示,并匯總于表1。
人工氧氣通量數據:在無真實通量的水槽中,計算出的電化學傳感器信號與流速波動之間的通量即為人工通量。結果顯示,縱向和垂直方向均檢測到顯著的人工通量,其值范圍很廣(見表1),且隨流速增加而增大。光學傳感器則未測到顯著通量。
研究意義:這是最直接的證據,證明攪拌敏感性確實會引入顯著的人工通量,其量級(最高達約230 mmol m?2 d?1)足以嚴重干擾真實的底棲氧氣通量測量。
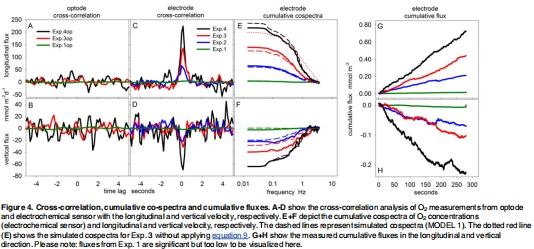
數據來源:通量值、顯著性水平(p值)匯總于表1。通量的時空特性(如交叉相關函數、協譜)展示在圖4中。
傳感器取向對人工通量的影響數據:通過改變傳感器與水流的夾角,測量了不同取向下的通量大小和方向。
研究意義:發現傳感器取向顯著影響人工通量的方向和可預測性。當傳感器尖端面向水流(~60°)時,人工通量向下且可由模型較好預測;當傳感器被遮擋時(如~135°),通量方向變為向上且行為難以預測。這為野外識別此類誤差提供了線索。
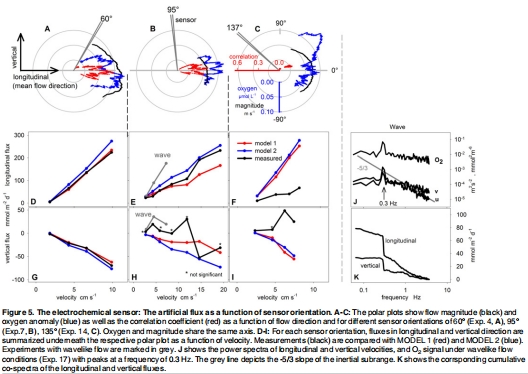
數據來源:不同取向下的通量方向與大小分析展示在圖5A-I。
五、結論
研究得出以下核心結論:
人工通量確實存在且顯著:理論和實驗均證實,電化學氧傳感器的攪拌敏感性會在渦度相關測量中引入不可忽視的人工通量。
人工通量模仿真實消耗:人工通量通常表現為向下的氧氣通量(即模仿沉積物耗氧),且其隨流速、底部粗糙度和背景氧氣濃度增加而增大的趨勢,與真實底棲耗氧的響應相似,難以區分。
誤差在強湍流環境下更嚴重:在高流速、大粗糙度(如珊瑚礁、牡蠣礁)或存在波浪的環境中,雷諾應力增大,導致人工通量顯著增加,而此時真實氧氣波動信號可能較弱,使得誤差更為突出。
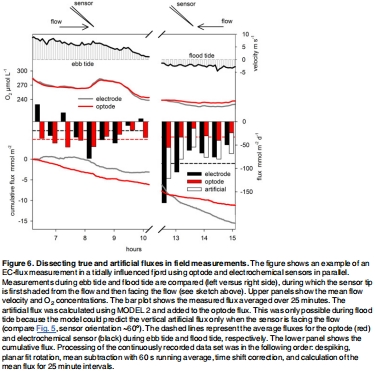
光學傳感器是解決方案:并行測試的光學微傳感器(optode)不消耗氧氣,無攪拌敏感性,在本實驗中和野外案例(圖6)中均未表現出顯著的人工通量,是未來渦度相關測量的理想選擇。
六、使用丹麥Unisense電極測量數據的研究意義詳細解讀
在本研究中,使用的電化學微傳感器由丹麥Unisense公司生產或基于其原理制造。其測量數據的研究意義至關重要,主要體現在以下幾個方面:
作為量化誤差的“標尺”和“示蹤器”:在本研究的受控實驗(無水槽)中,Unisense電化學傳感器是產生和量化人工通量的核心工具。其測量到的氧氣濃度波動,在排除了所有真實生物地球化學過程后,純粹反映了流速變化對傳感器自身信號的物理影響。這使得研究人員能夠首次精確地分離和量化出由傳感器物理特性本身引入的誤差大小,而不是將其與真實的環境通量混為一談。
揭示了誤差的物理機制和動態規律:通過對Unisense傳感器數據的詳細分析(如圖4的交叉相關和協譜分析,圖5的極坐標分析),研究清晰地揭示了人工通量的產生機制:流速波動→改變擴散邊界層厚度→引起傳感器信號波動→這種信號波動與流速波動(特別是雷諾應力)相關→計算得出虛假的通量。同時,數據表明,這種相關性在傳感器面向水流時最穩定、可預測,而當傳感器被遮擋時則變得 erratic。
提供了誤差范圍的基準:Unisense是國際上廣泛用于高精度微環境測量的知名品牌。本研究使用其傳感器測得的的人工通量范圍(2-70 mmol m?2 d?1,甚至更高),為整個水生渦度相關領域提供了一個重要的誤差基準。它警示研究者,即使使用高性能的電化學傳感器,其測量結果中也可能包含相當大的、由儀器本身引入的偏差。
通過對比凸顯技術革新方向:將Unisense電化學傳感器的數據與光學傳感器的數據進行對比,是本研究論證其核心論點的關鍵。電化學傳感器顯示出顯著的人工通量,而光學傳感器則沒有。這種鮮明的對比,有力地支持了論文的最終建議——在未來的渦度相關研究中,應采用光學傳感器來替代傳統的電化學傳感器,以避免攪拌敏感性帶來的誤差。
總而言之,本研究中使用Unisense電化學電極測量數據的研究意義,不在于用它來準確測量環境氧氣,而恰恰在于利用其固有的物理缺陷作為研究對象,系統性地揭示、量化并預警了一種在渦度相關測量中長期被忽視的重要誤差來源。這項研究通過對一種經典工具局限性的深入剖析,直接推動了對該技術方法的反思與革新。